Elektronische Bauteile für den Roboterbau
- Die LED
- Der Widerstand
- Der Raspberry Pi Pico
- Der Transistor
- Der Motortreiber
- Der Spannungswandler
- Das Wukong 2040 Board
Die LED

Die LED oder Leuchtdiode hat heute die Glühlampe fast vollständig verdrängt. Und das hat auch gute Gründe. Der Wirkungsgrad einer LED liegt bei 30–40 %. Der Wirkungsgrad einer Glühlampe liegt bei ca. 5 % ¹. Das heißt, dass eine LED 30–40 % der eingesetzten Energie in Licht umwandelt. Eine normale Glühlampe ist damit zu 95 % eine Heizung und nur zu 5 % ein Leuchtmittel. Die LED ist damit immer noch nicht perfekt, aber das Beste, das es zurzeit für die Lichterzeugung gibt. Außerdem lebt sie länger als die Glühlampe, die aufgrund ihrer Konstruktion schnell altert.
Die Polung der LED
Eine LED muss richtig gepolt werden, um zu leuchten. Wird sie verpolt, kann sie dabei kaputtgehen. Das lange Beinchen heißt Anode und ist die positive Seite. Die kurze Seite ist die Kathode und die negative Seite oder Masse. Eine LED muss immer zusammen mit einem Widerstand geschaltet werden.
Wie eine LED mit dem Pico an- und ausgeschaltet werden kann, steht hier
Der Widerstand

Der Widerstand ist dafür da, andere elektronische Bauteile vor Überlastung zu schützen. Es gibt ihn in mit sehr vielen verschiedenen Widerstandswerten. Diese sind mit einem Farbcode angegeben.

Der Raspberry Pi Pico
Der Pico ist das Herzstück des Roboters, denn er führt den Code aus, der den Roboter steuert. Der Pico wird mit Micropython programmiert, das eine kleinere Ausgabe des großen Pythons ist.
 Der Pico ist, wie die meisten elektronischen Teile, sehr empfindlich gegen Verpolung oder Überlastung oder Kurzschlüsse. Daher muss man immer sehr sorgfältig alle Verbindungen überprüfen, bevor eine Spannung angelegt wird.
Der Pico ist, wie die meisten elektronischen Teile, sehr empfindlich gegen Verpolung oder Überlastung oder Kurzschlüsse. Daher muss man immer sehr sorgfältig alle Verbindungen überprüfen, bevor eine Spannung angelegt wird.

Detaillierter Pinout-Plan des Pico zum Download
Er wird über einen Mikro-USB-Anschluss an den Computer angeschlossen. Als Entwicklungsumgebung benutzen wir Thonny.
Um die Pin-Anschlüsse ansteuern zu können, muss zunächst aus der Bibliothek machine Pin importiert werden:
from machine import Pin
Nicht alle Pins haben dieselben Fähigkeiten. Welcher Pin was kann, steht im detaillierten Pinout-Plan. Generell sollten für den Roboterbau die angegebenen Pins verwendet werden. Diese sind auf jeden Fall geeignet für die benötigte Funktion und die Fehlersuche wird erleichtert, wenn man nicht jedes Mal auch die Zuordnung der Pins überprüfen muss.
Der Transistor
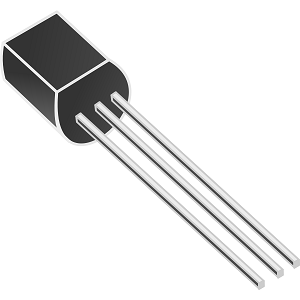
Das Schaltzeichen
Transistoren gibt es in vielen verschiedenen Ausfertigungen. Dies ist ein Beispiel.
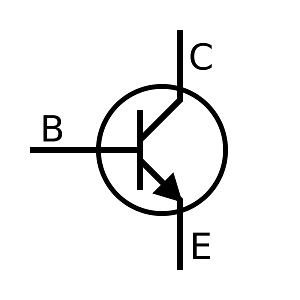
Das heißt, mit einem Transistor kann man mit einer niedrigen Spannung eine größere Spannung regulieren. Das kann ein einfacher Schaltvorgang sein oder die relative Regelung einer Spannung. Damit ist der Transistor in seiner Grundfunktion ein Verstärker. In einer digitalen Schaltung wird der Transistor auch wieder nur an- oder ausgeschaltet. Die Regelung der Helligkeit einer LED oder der Geschwindigkeit eines Motors erfolgt genauso wie ohne Transistor.
Für den Roboterbau werden wir nicht direkt mit einem Transistor arbeiten. Sie sind aber Teil fast aller Bauteile, die verwendet werden.
Der Transistor ist die Grundvoraussetzung, dass es moderne Computer gibt.
Ein Transistor ist ein elektronisches Halbleiter-Bauelement zum Steuern oder Verstärken meistens niedriger elektrischer Spannungen und Ströme. Er ist der weitaus wichtigste „aktive“ Bestandteil elektronischer Schaltungen, der beispielsweise in der Nachrichtentechnik, der Leistungselektronik und in Computersystemen eingesetzt wird. Besondere Bedeutung haben Transistoren – zumeist als Ein/Aus-Schalter – in integrierten Schaltkreisen, was die weit verbreitete Mikroelektronik ermöglicht.
Die Bezeichnung „Transistor“ ist ein Kofferwort des englischen transfer resistor, was in der Funktion einem durch eine angelegte elektrische Spannung oder einen elektrischen Strom steuerbaren elektrischen Widerstand entspricht. Die Wirkungsweise ähnelt der einer entsprechenden Elektronenröhre, nämlich der Triode.
Quelle: Wikipedia: https://de.wikipedia.org/wiki/Transistor
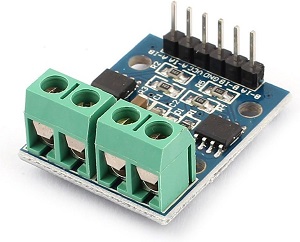
Der Motortreiber
Aktuelle Variante

Dieser Motortreiber beinhaltet gleichzeitig einen Spannungswandler, der genau 5V Gleichspannung liefert.
Vorherige Variante
Dieser Typ Motortreiber ist häufiger mal durchgebrannt. Daher wurde er durch ein stärkeres Modell ersetzt.
Der Spannungswandler
Der Spannungswandler wird mittlerweile nicht mehr benötigt, da dieser im neuen Motortreiber integriert ist.

Mit dem Spannungswandler können wir eine Gleichspannung in eine niedrigere Spannung umwandeln. Da wir für die Motoren 6-9V benötigen, der Pico und die elektronischen Komponentenn aber nur 3,3V - 5 V vertragen, betreiben wir den Roboter mit einer 9V Batterie und nutzen den Spannungswandler für den Pico. Der Pico wiederum stellt 3,3V für den Betrieb der anderen Teile bereit.
Der Spannungswandler muss vor dem Anschluss an den Pico auf die richtige Spannung eingestellt werden. Dafür haben wir Spannungsmessgeräte.
Das Wukong 2040 Board
Das Wukong 2040 Board wird für die Roboter „Walky“ und „Crawly“ benötigt. Es bietet praktische Anschlüsse für bis zu 12 Servomotoren und 4 Motoren. Außerdem bietet es zwei farbige LEDs, zwei Druckknöpfe und einen Buzzer. Die Stromversorgung läuft über einen 3,7V-Akku, der in dem Board aufladbar ist.
Als Gehirn dient natürlich wieder ein Raspberry Pi Pico.
