Zusammenbau des SMARS-Roboters
In diesem Kapitel werden die mechanischen Aufbauschritte erklärt.
- Das Steckbrett mit Raspberry Pi Pico und Abdeckplatte
- Gehäuse und Räder
- Anschluss der Motoren
- Der Ultraschallsensor
- Der komplette Roboter
- Der Kettenantrieb
- Erweiterungen
Das Steckbrett mit Raspberry Pi Pico und Abdeckplatte
Es gibt verschiedene Varianten von Platten, auf denen das Steckbrett aufgeklebt ist.
Aktuelle Variante
Diese Variante ist für den „Theo III“!!
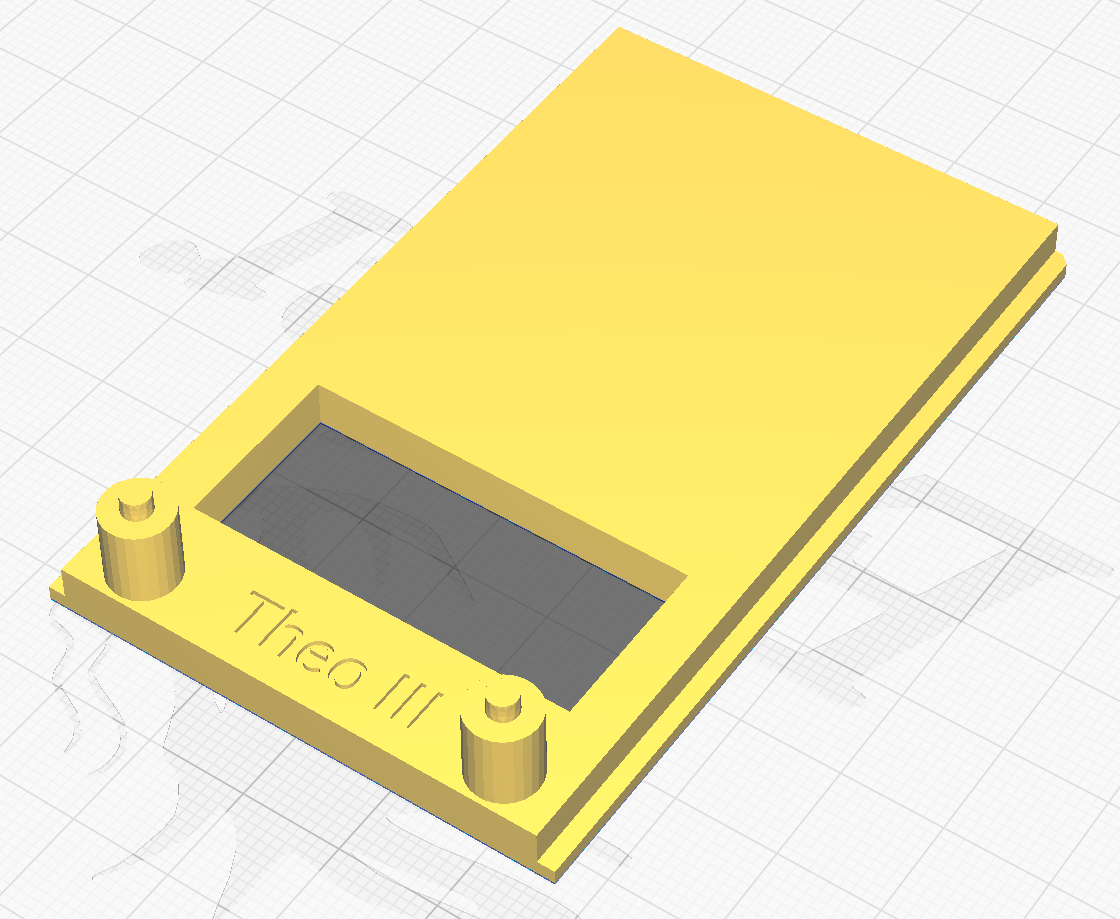
In dieser Variante wird das Steckbrett quer aufgeklebt. Die Abdeckplatte wir von hinten in den Roboter eingeschoben.
Ältere Varianten
älteste Variante

Die ältere Variante wird von oben auf das Gehäuse gesteckt.
neuere Variante
Die neuere Variante wird von hinten in das Gehäuse eingeschoben.

Gehäuse und Räder
Es gibt mehrere Varianten von Gehäusen für die SMARS-Roboter. Das aktuellste ist der „Theo III“.
Theo III
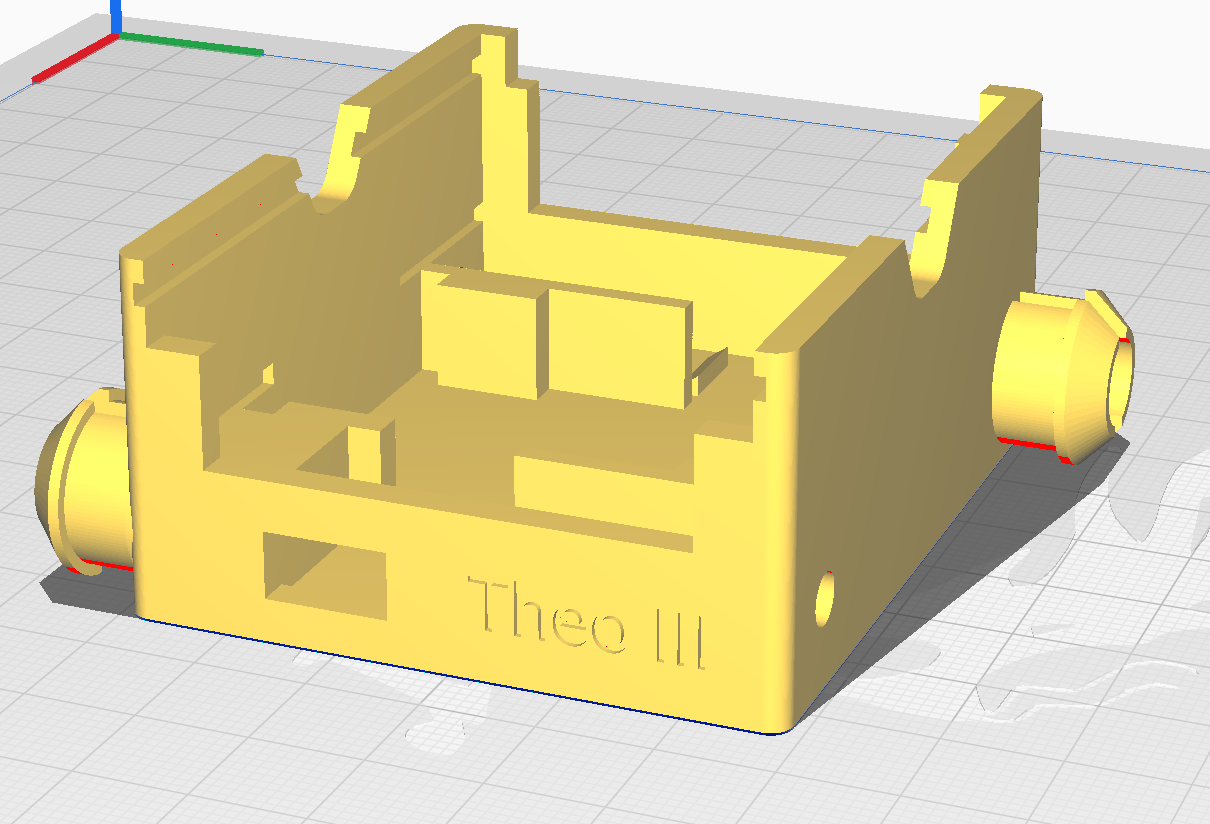
Ein neu gedrucktes Gehäuse enthält noch einige Stützstrukturen um die Halterungen für die passiven Räder und in dem Schlitz für den Schalter. Diese müssen zunächst entfernt werden. Das Gehäuse wird mit den passiven Rädern montiert ausgeteilt. Diese sollten nicht mehr entfernt werden, da das Gehäuse dabei brechen kann. Generell ist darauf zu achten, dass die Seitenwände nicht belastet werden, da sie schnell abbrechen können.
Es gibt bei dem Gehäuse ein vorne und hinten. Hinter erkennt man an der Einprägung „Theo III“. Dort befindet sich auch der Schalter. Beim Einsetzen der Motoren ist darauf zu achten, dass der Motor mit den längeren Kabeln nach vorne kommt.
Für die aktiven Räder müssen zunächst die Motoren eingesetzt werden. Im Idealfall rasten die Motoren ein und sind dann schon fest. Wenn der 3D-Druck ungenau war, kann es sein, dass die Motoren nur sehr schwer einrasten oder gar nicht. Die Löcher an den Rädern, in die die Motorwellen eingesteckt werden, haben, genau wie die Motorwellen, eine abgeflachte Seite. Diese müssen zusammengebracht werden. Es kann sein, dass die Motorwelle nicht passt. In diesem Fall muss das Loch vorsichtig erweitert werden. Hier kann es schnell passieren, dass das Loch zu groß wird. Dann hilft nur noch Klebstoff.
Ältere Versionen
Gehäuse für Kettenfahrzeug
Das Gehäuse kann direkt nach dem Druck noch einige Rückstände der Stützstrukturen enthalten. Das bedeutet vor allem, dass die Löcher für die Motorwellen zu sind und dass die Aufnahme für die passiven Räder noch gesäubert werden müssen. Grundsätzlich muss man beim Entfernen von Material sehr vorsichtig sein, da man schnell zu viel weggenommen hat.

Als Erstes sollten die passiven Räder aufgesteckt werden. Dazu wird das Gehäuse hochkant flach auf die Tischfläche gelegt und dann werden die Räder aufgesteckt. Dies kann sehr schwer sein. Da die Gehäuse leicht brechen können, muss man darauf achten, keinen Druck auf die oberen Ränder auszuüben. Sind die Räder erst einmal aufgesteckt, sollten sie nicht mehr entfernt werden.
Gehäuse für Gummireifenfahrzeug
Diese Gehäuse sollten sofort einsatzbereit sein. Dennoch sollte man vorher schauen, ob es noch irgendwo Überbleibsel von Stützstrukturen gibt, die vorher entfernt werden sollten.
 Die passiven Räder haben keine Gummireifen und werden mithilfe von kurzen Stiften auf den Achsen befestigt.
Die passiven Räder haben keine Gummireifen und werden mithilfe von kurzen Stiften auf den Achsen befestigt.
Aktive Räder an beiden Gehäusetypen
Die 9V-Batterie wird zwischen die Motoren gelegt. Der Clip sollte auch schon befestigt werden. Dabei ist darauf zu achten, dass sich die blanken Kabelenden nicht berühren können (Isolierband). Die Kabel der Motoren sollten durch die Halterungen für die 9V-Batterie geführt werden. Damit kann der SMARS Roboter schon auf eigenen Rädern stehen.
Anschluss der Motoren
Folgende Verbindungen werden benötigt, um die Motoren zum Laufen zu bringen:
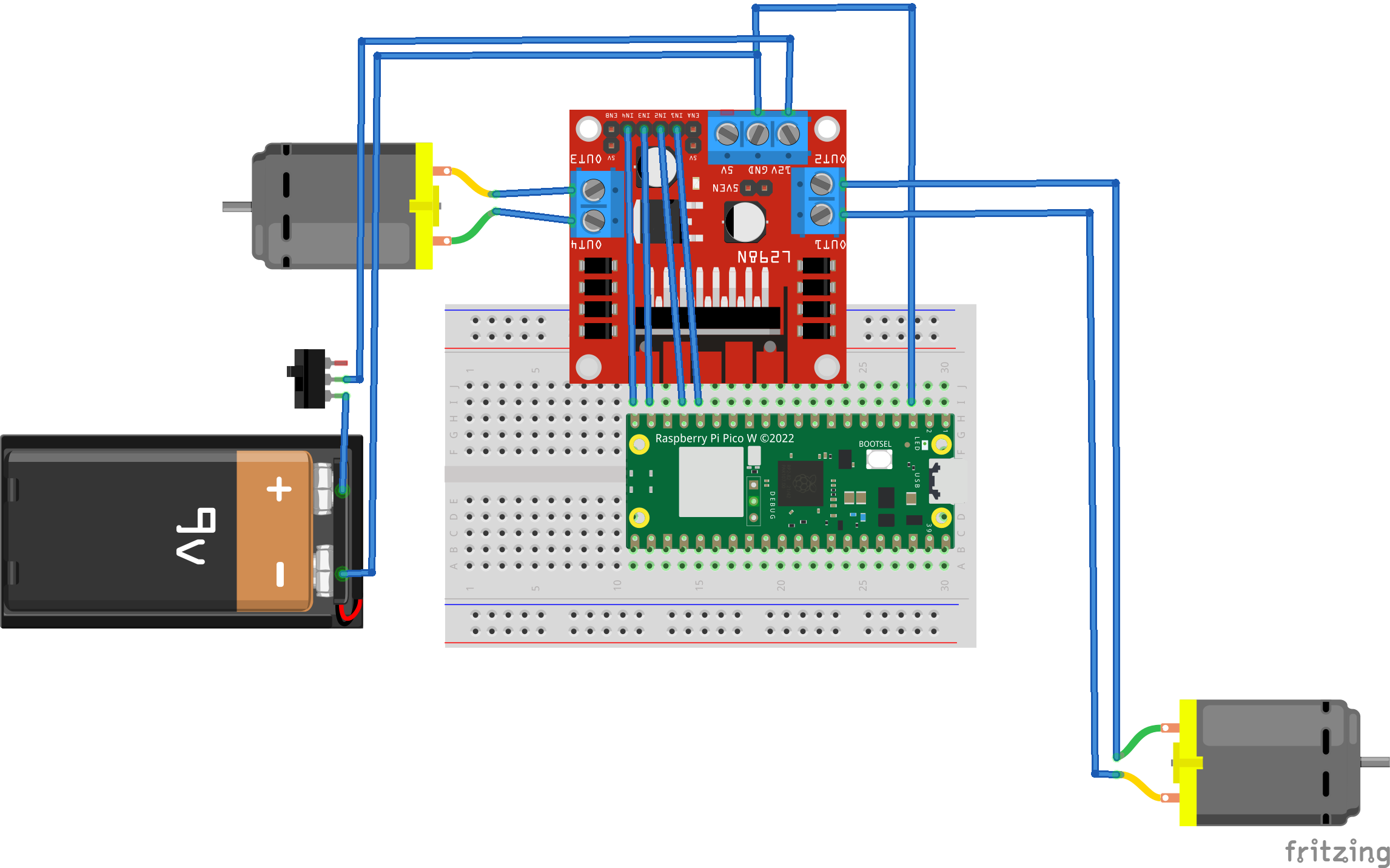
Die 9V Batterie versorgt die Motoren mit Strom. Die vier Datenkabel IN1, IN2, IN3, IN4 steuern den Motor. Dabei sind IN1 und IN2 für den einen und IN3 und IN$ für den anderen Motor zuständig. Diese steuern die Brückenschaltung im Motortreiber. Die Richtungssteuerung erfolgt, indem die Signale an den Pins vertauscht werden. Ein Pin muss aus sein, der andere ist an. Wird dieser mithilfe der PWM-Modulation gesteuert, lässt sich auch die Geschwindigkeit regulieren. Hierfür kann dann die Bibliothek für die Motorsteuerung in der robotlibrary benutzt werden.
Der Ultraschallsensor
Der Ultraschallsensor wird von oben in die Halterung geschoben und danach wird das Gehäuse von vorne aufgesteckt. Die beiden Augen des Sensors schließen dann bündig mit dem Gehäuse ab. Die Halterung wird dann von oben auf das Gehäuse vorne oder hinten aufgeschoben und die Anschlüsse für die Kabel müssen nach oben geführt werden.
Für den Betrieb des Ultraschallsensors verwendet man eine Bibliothek. Diese ist in der robotlibrary enthalten.
Für die neueste Version des Roboters (Theo III) gibt es verschiedene Varianten von Halterungen, die ein Verstellen und alternative Befestigungen ermöglichen.
Der komplette Roboter
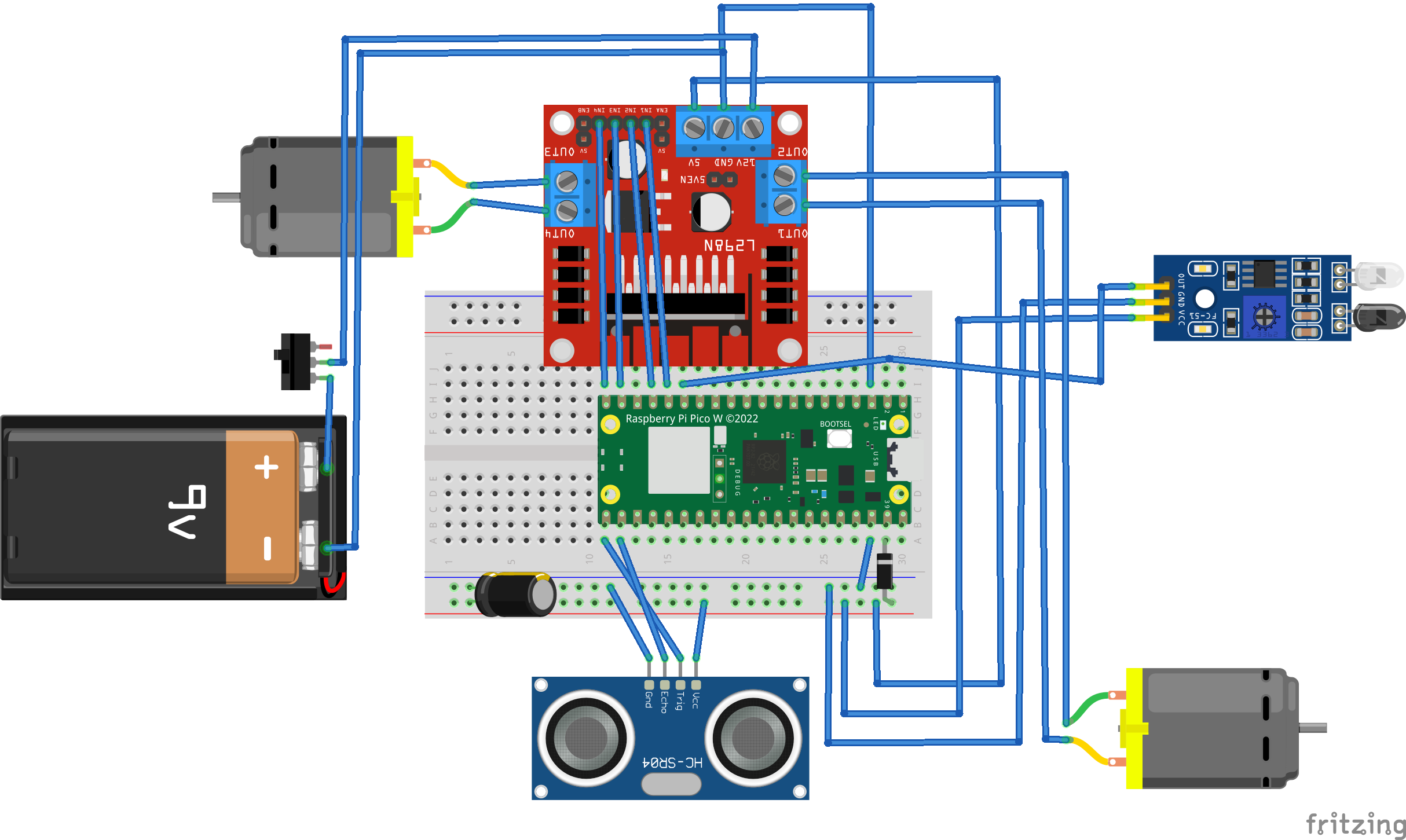
Komplett zusammengebaut sollte der Roboter dann so aussehen (schematische Darstellung):
Neueste Version (Theo III)
Grundsätzlich müssen alle Bauteile auf die richtige Polung überprüft werden. Es reicht nicht, alles so zu stecken, wie es auf dem Schaubild steht, da es beim Steckbrett und den Bauteilen Abweichungen geben kann. Beim Verpolen gehen die Bauteile schnell kaputt und die Batterie läuft leer.
Deshalb lohnt es sich, alles gut zu überprüfen!
Ältere Version des Roboters (v1 und v2)

Der Kettenantrieb
Die Kette ist das mechanisch komplizierteste Element des SMARS-Roboters. Die einzelnen Kettenglieder (16 Stück pro Seite) werden mit Stücken von Filament zusammengesetzt. Dabei ist darauf zu achten, dass die Stücke nicht seitlich herausgucken und am Gehäuse hängenbleiben können. Eines könnte ein Stück heraus stehen bleiben, um die Kette einfacher aufmachen zu können.
Die Kette darf weder zu stramm noch zu locker sein. Eine zu kurze Kette zieht die Räder zusammen und der Motor kann diese Reibung nicht überwinden. Eine zu lockere Kette spurt leicht aus und setzt sich dann auf die Rauten auf den Rädern. Dann wird die Spannung auch zu stark. Es kann eine ganze Weile dauern, bis man eine gut funktionierende Kette zusammengebaut hat.
Außerdem werden sich die beiden Ketten nicht gleich schnell drehen, da die Motoren nicht miteinander synchronisiert sind. Hier kann man versuchen, die beiden Seiten mit unterschiedlichen Geschwindigkeiten zu betreiben, bis der Roboter möglichst geradeaus fährt.
Unterschiedlich lange Kettenglieder
Um die Kettenlänge anzupassen, gibt es unterschiedlich lange Kettenglieder. Diese sollten eins nach dem anderen in die Kette eingefügt werden, bis die richtige Länge erreicht ist. Zuviele Kettenglieder, die nicht die Standardlänge haben, können auch zu Problemen führen, da sie nicht mehr passgenau auf den Rädern sitzen.
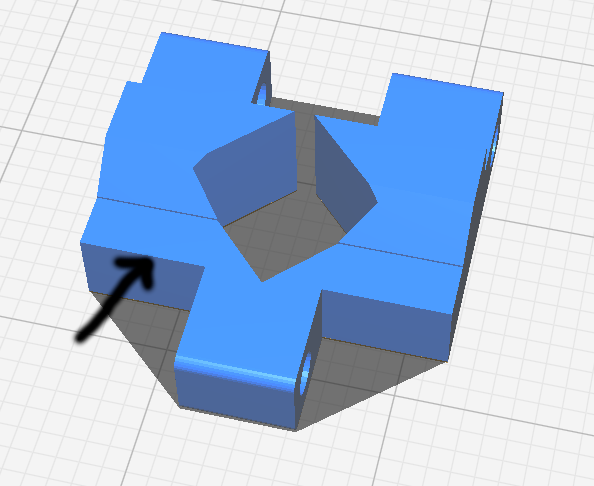
Normale Länge
Die normal langen Kettenglieder sind an der vorderen Kante rechtwinklig geschnitten.
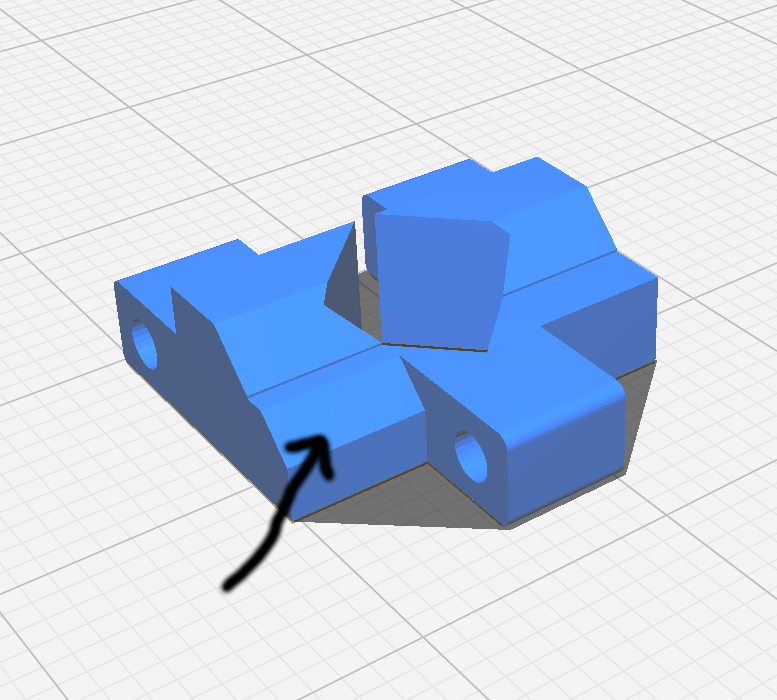
kürzere Länge
Die etwas kürzeren Kettenglieder haben auf der linken Seite eine Fase.
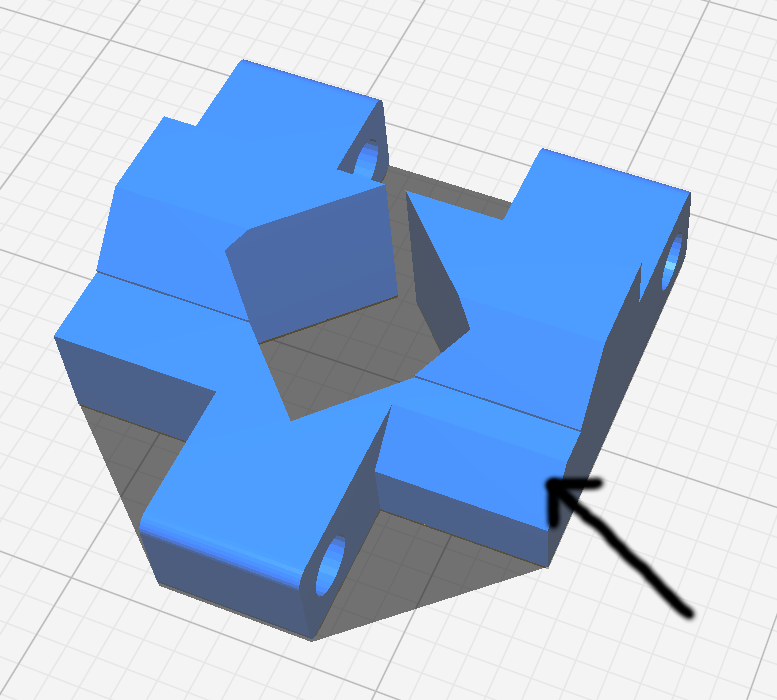
längere Länge
Und die längeren Kettenglieder sind rechts gefast.
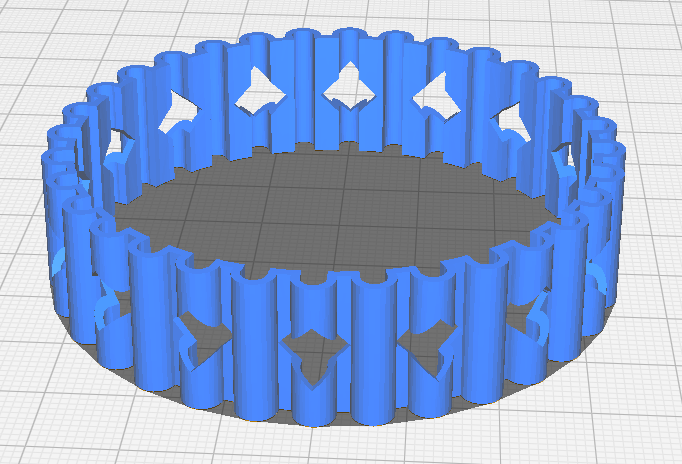
Elastische Kette
Alternativ gibt es auch Ketten aus TPU, die elastisch sind.
Erweiterungen
Messung der Batteriestärke
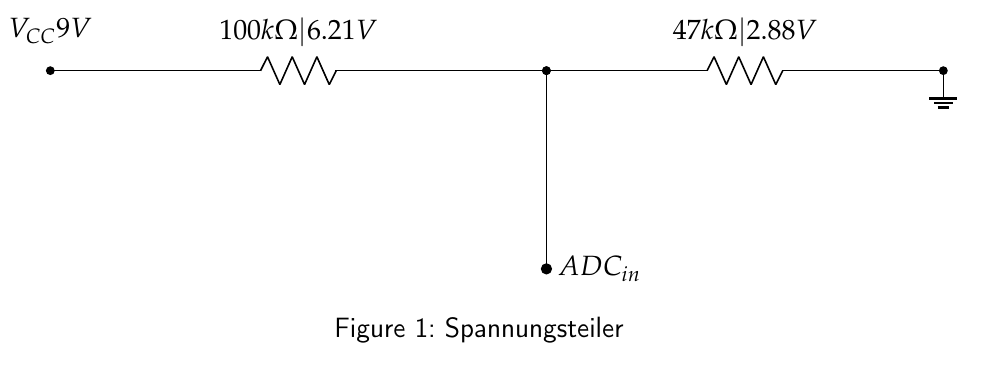
Den Spannungsteiler kann man verwenden, um den Ladestand der Batterie zu messen. Dazu muss die Spannung unter 3,3V gebracht werden, um die Pins des Picos nicht zu beschädigen. Dazu werden zwei Widerstände mit den richtigen Werten in Reihe geschaltet und die Spannung zwischen den Widerständen und Masse über einen Analog-Digital-Wandler gemessen. Beim Pico sind das die Pins 26, 27 und 28. Ein ADC-Pin wird folgendermaßen initialisiert:
from machine import ADC
batt_pin = ADC(28)
while True:
print(batt_pin.read_u16())
Nun muss man nur noch den zurückgelieferten Wert einer neuen Batterie messen und den Wert, wenn sie nicht mehr ausreichend Energie liefert. Dann kann man z. B. einen Alarm ausgeben oder die Funktionen des Roboters anpassen.
Die robotlibrary stellt auch hierfür eine Methode in der Klasse Robot bereit.