Der Kettenantrieb
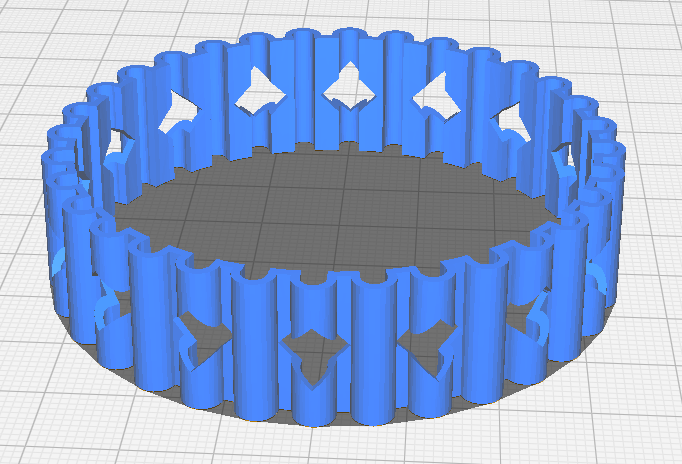
Die Kette ist das mechanisch komplizierteste Element des SMARS-Roboters. Die einzelnen Kettenglieder (16 Stück pro Seite) werden mit Stücken von Filament zusammengesetzt. Dabei ist darauf zu achten, dass die Stücke nicht seitlich herausgucken und am Gehäuse hängenbleiben können. Eines könnte ein Stück heraus stehen bleiben, um die Kette einfacher aufmachen zu können.
Die Kette darf weder zu stramm noch zu locker sein. Eine zu kurze Kette zieht die Räder zusammen und der Motor kann diese Reibung nicht überwinden. Eine zu lockere Kette spurt leicht aus und setzt sich dann auf die Rauten auf den Rädern. Dann wird die Spannung auch zu stark. Es kann eine ganze Weile dauern, bis man eine gut funktionierende Kette zusammengebaut hat.
Außerdem werden sich die beiden Ketten nicht gleich schnell drehen, da die Motoren nicht miteinander synchronisiert sind. Hier kann man versuchen, die beiden Seiten mit unterschiedlichen Geschwindigkeiten zu betreiben, bis der Roboter möglichst geradeaus fährt.
Unterschiedlich lange Kettenglieder
Um die Kettenlänge anzupassen, gibt es unterschiedlich lange Kettenglieder. Diese sollten eins nach dem anderen in die Kette eingefügt werden, bis die richtige Länge erreicht ist. Zuviele Kettenglieder, die nicht die Standardlänge haben, können auch zu Problemen führen, da sie nicht mehr passgenau auf den Rädern sitzen.
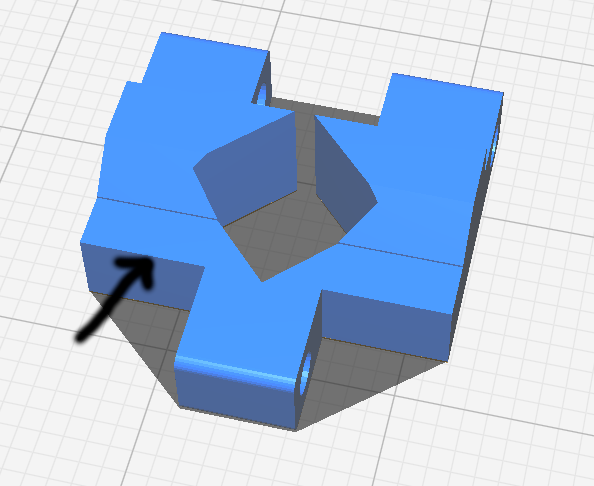
Normale Länge
Die normal langen Kettenglieder sind an der vorderen Kante rechtwinklig geschnitten.
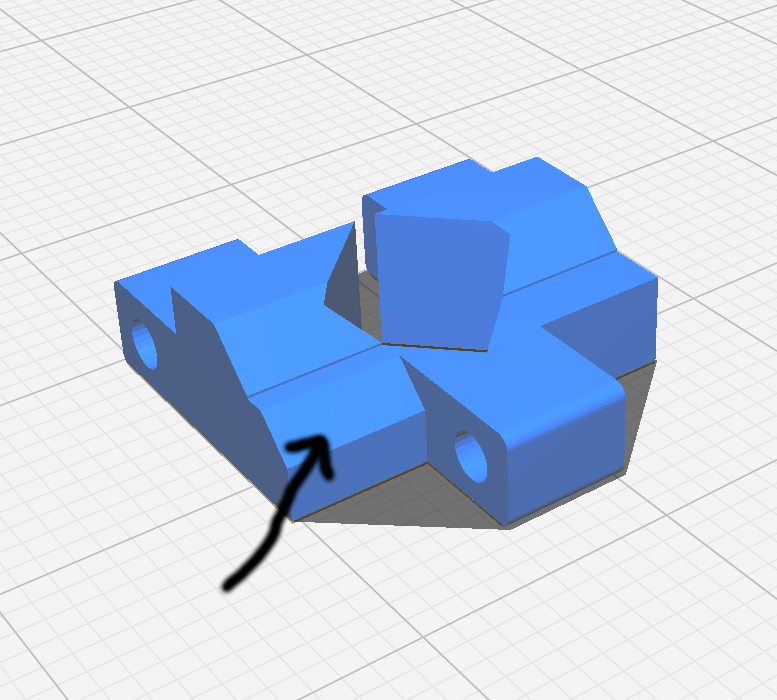
kürzere Länge
Die etwas kürzeren Kettenglieder haben auf der linken Seite eine Fase.
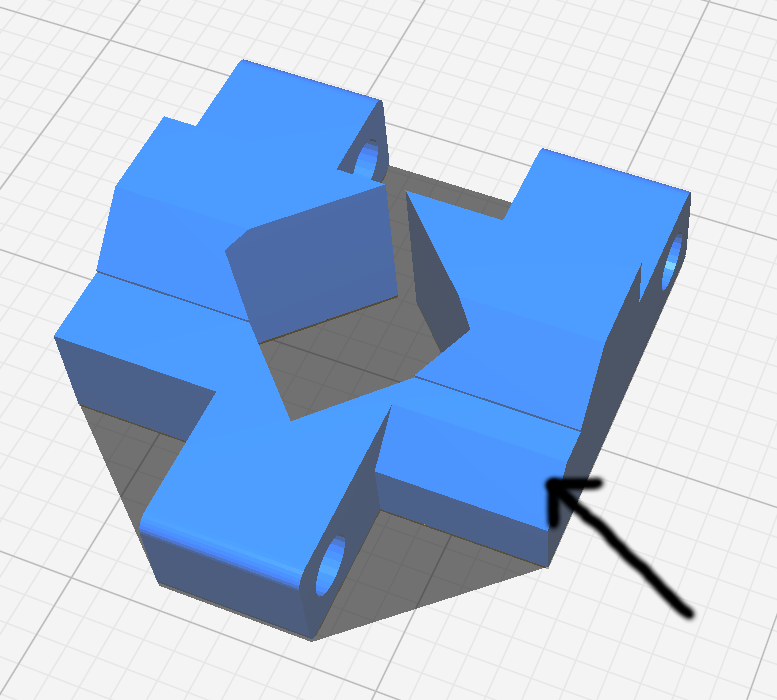
längere Länge
Und die längeren Kettenglieder sind rechts gefast.
Elastische Kette
Alternativ gibt es auch Ketten aus TPU, die elastisch sind.