Gehäuse und Räder
Es gibt mehrere Varianten von Gehäusen für die SMARS-Roboter. Das aktuellste ist der „Theo III“.
Theo III
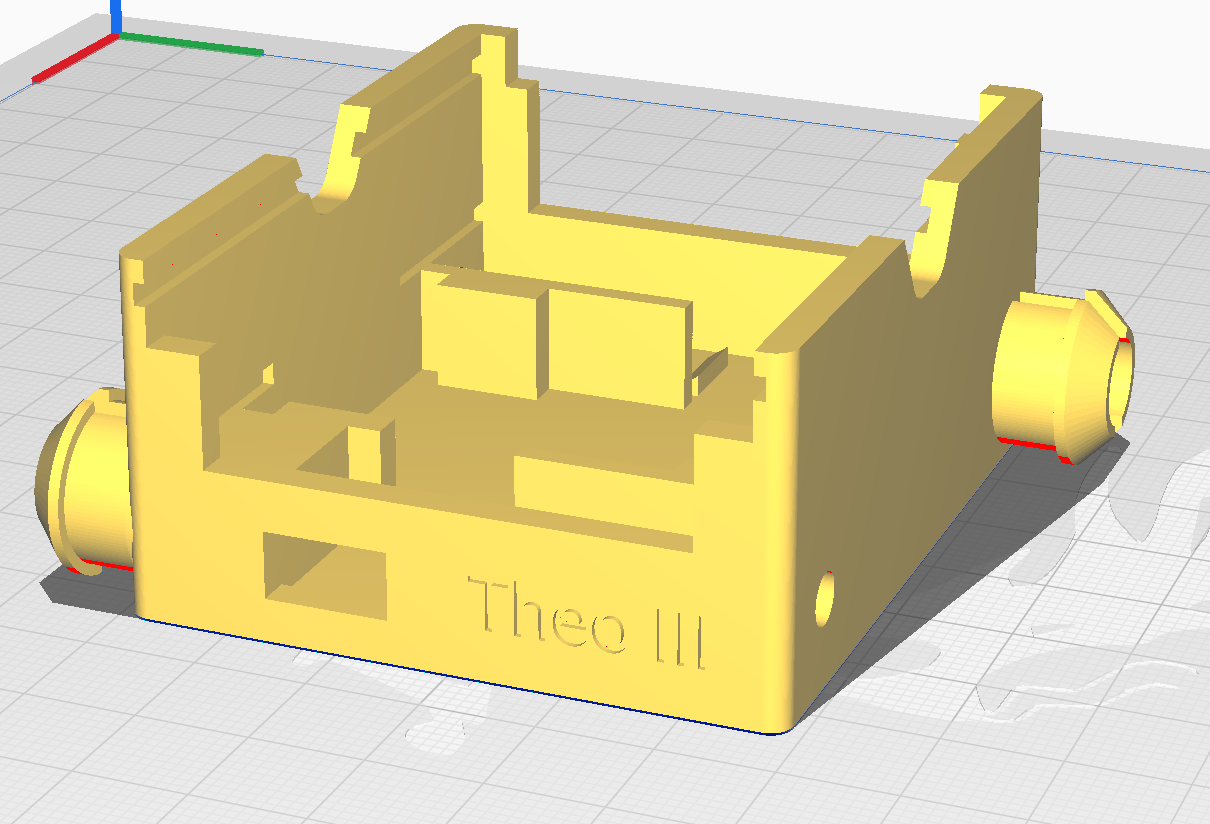
Ein neu gedrucktes Gehäuse enthält noch einige Stützstrukturen um die Halterungen für die passiven Räder und in dem Schlitz für den Schalter. Diese müssen zunächst entfernt werden. Das Gehäuse wird mit den passiven Rädern montiert ausgeteilt. Diese sollten nicht mehr entfernt werden, da das Gehäuse dabei brechen kann. Generell ist darauf zu achten, dass die Seitenwände nicht belastet werden, da sie schnell abbrechen können.
Es gibt bei dem Gehäuse ein vorne und hinten. Hinter erkennt man an der Einprägung „Theo III“. Dort befindet sich auch der Schalter. Beim Einsetzen der Motoren ist darauf zu achten, dass der Motor mit den längeren Kabeln nach vorne kommt.
Für die aktiven Räder müssen zunächst die Motoren eingesetzt werden. Im Idealfall rasten die Motoren ein und sind dann schon fest. Wenn der 3D-Druck ungenau war, kann es sein, dass die Motoren nur sehr schwer einrasten oder gar nicht. Die Löcher an den Rädern, in die die Motorwellen eingesteckt werden, haben, genau wie die Motorwellen, eine abgeflachte Seite. Diese müssen zusammengebracht werden. Es kann sein, dass die Motorwelle nicht passt. In diesem Fall muss das Loch vorsichtig erweitert werden. Hier kann es schnell passieren, dass das Loch zu groß wird. Dann hilft nur noch Klebstoff.
Ältere Versionen
Gehäuse für Kettenfahrzeug
Das Gehäuse kann direkt nach dem Druck noch einige Rückstände der Stützstrukturen enthalten. Das bedeutet vor allem, dass die Löcher für die Motorwellen zu sind und dass die Aufnahme für die passiven Räder noch gesäubert werden müssen. Grundsätzlich muss man beim Entfernen von Material sehr vorsichtig sein, da man schnell zu viel weggenommen hat.

Als Erstes sollten die passiven Räder aufgesteckt werden. Dazu wird das Gehäuse hochkant flach auf die Tischfläche gelegt und dann werden die Räder aufgesteckt. Dies kann sehr schwer sein. Da die Gehäuse leicht brechen können, muss man darauf achten, keinen Druck auf die oberen Ränder auszuüben. Sind die Räder erst einmal aufgesteckt, sollten sie nicht mehr entfernt werden.
Gehäuse für Gummireifenfahrzeug
Diese Gehäuse sollten sofort einsatzbereit sein. Dennoch sollte man vorher schauen, ob es noch irgendwo Überbleibsel von Stützstrukturen gibt, die vorher entfernt werden sollten.
 Die passiven Räder haben keine Gummireifen und werden mithilfe von kurzen Stiften auf den Achsen befestigt.
Die passiven Räder haben keine Gummireifen und werden mithilfe von kurzen Stiften auf den Achsen befestigt.
Aktive Räder an beiden Gehäusetypen
Die 9V-Batterie wird zwischen die Motoren gelegt. Der Clip sollte auch schon befestigt werden. Dabei ist darauf zu achten, dass sich die blanken Kabelenden nicht berühren können (Isolierband). Die Kabel der Motoren sollten durch die Halterungen für die 9V-Batterie geführt werden. Damit kann der SMARS Roboter schon auf eigenen Rädern stehen.