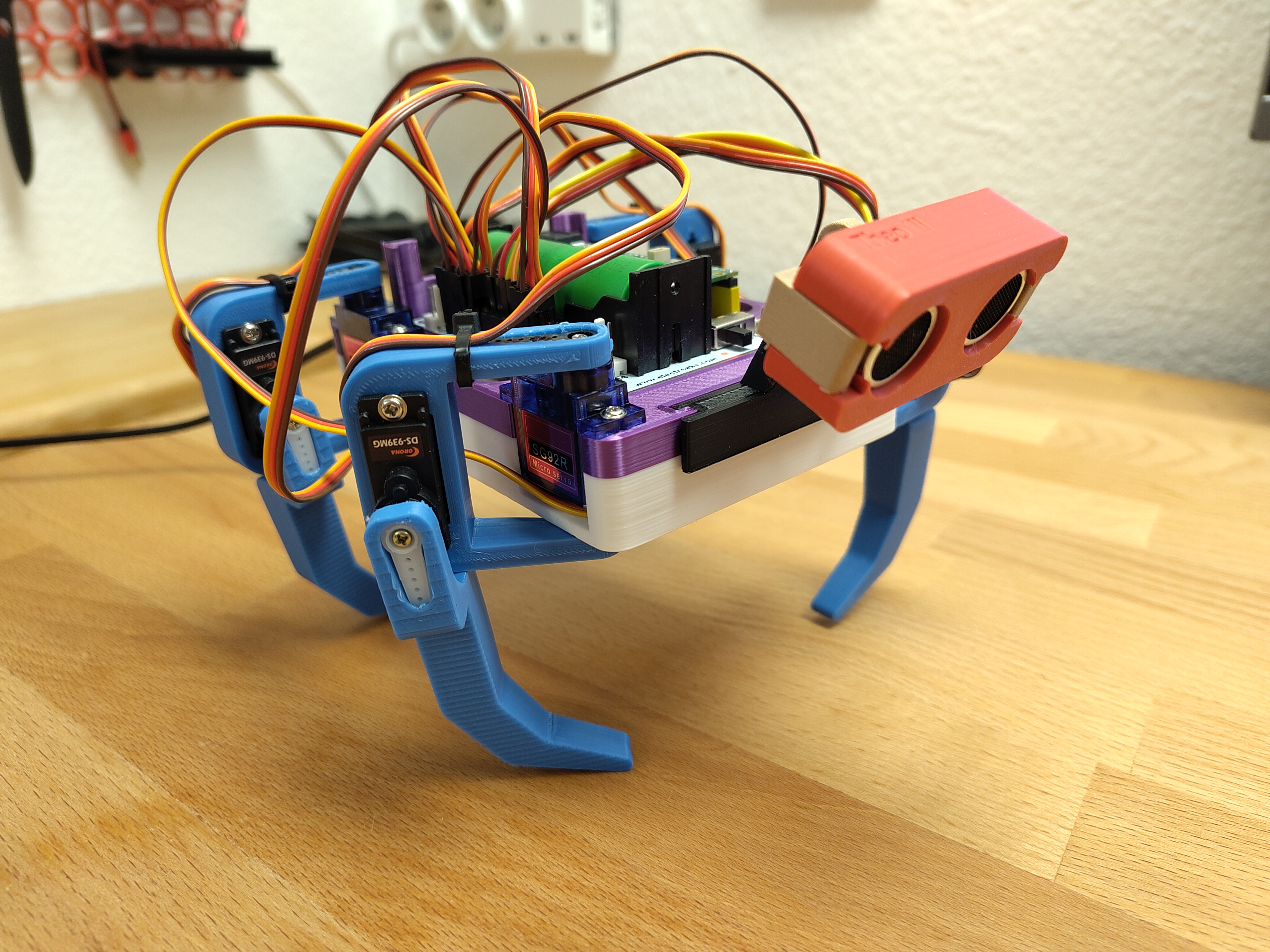
Der komplette Crawly
Komplett zusammengebaut sieht Crawly so aus.
 Der Prototyp des Bewegungsablaufs sieht so aus:
Der Prototyp des Bewegungsablaufs sieht so aus:
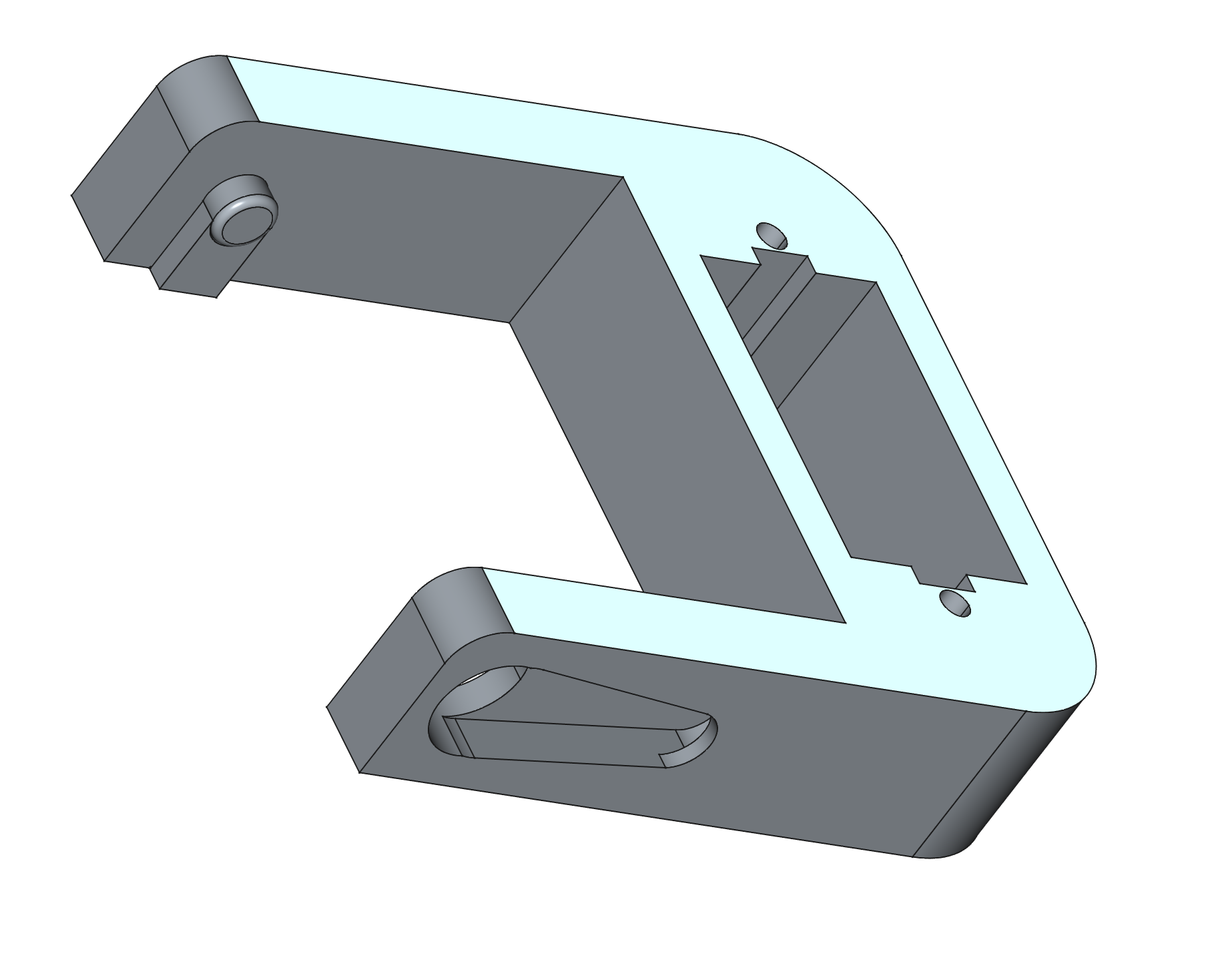
Zusammenbau der Beine
An den Beinen muss eventuell die Unterstützungsstruktur des 3D-Drucks noch entfernt werden. Das Bild oben zeigt, wie die Teile zusammengesetzt werden müssen.
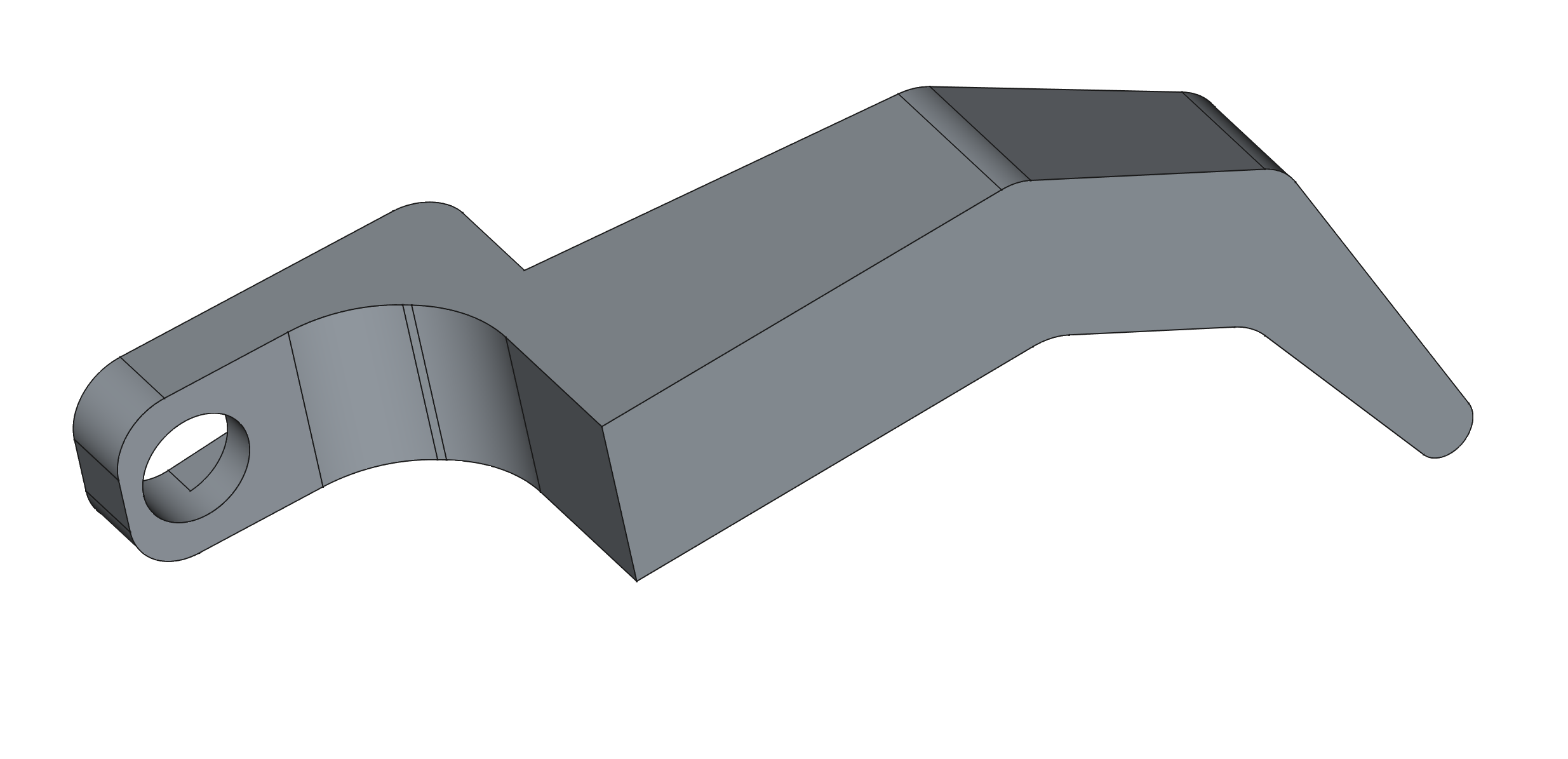
2 Beine am Gehäuse befestigen
Der Schenkel muss wie eine Klammer auf den Servomotor gesetzt werden. Dabei aufpassen, dass nicht zu viel Druck ausgeübt wird.
3 Anschlüsse und Software
Es ist sinnvoll, die Servomotoren in einer vernünftigen Reihenfolge anzuschließen. Ich habe mit dem Bein links hinten angefangen (Pin 0) und bin dann im Uhrzeigersinn vorgegangen. Dabei kam der Hüftmotor immer vor dem Kniemotor.
Bibliotheken für die verschiedenen Teile des Roboters mit Beispielcode für eine Vorwärtsbewegung sind in der robotlibrary integriert.